Introduction to Autonomous Robots
Any Autonomous Robot consists of following essential parts.
1. Robot Chassis and actuators
Includes wheeled or any type of chassis with all the necessary actuators fitted on the chassis to achieve desired goal. We mostly use DC geared motors as actuators.
2. Electronics
Electronics includes Sensors, motion control circuits, power management system etc.
3. Power Source
Usually battery pack consisting of Lead acid, Nickel cadmium, Nickel metal hydride or Lithium batteries is used.
4. Intelligence
This is the most important part of the autonomous robots. Usually intelligence is achieved by using Microcontroller.
First step in making an autonomous robot is to chalk out what tasks we are expecting the robot to perform. After gauging these we get a vague idea about the design and appearance of the robot.
Robot Chassis Designing
Selecting the Drive Mechanism for the wheeled motion:
Robot with steering wheel:
• Power for motion is provided by back wheels and turning is achieved using front wheels.
• This scheme is similar to that of cars.
Any Autonomous Robot consists of following essential parts.
1. Robot Chassis and actuators
Includes wheeled or any type of chassis with all the necessary actuators fitted on the chassis to achieve desired goal. We mostly use DC geared motors as actuators.
2. Electronics
Electronics includes Sensors, motion control circuits, power management system etc.
3. Power Source
Usually battery pack consisting of Lead acid, Nickel cadmium, Nickel metal hydride or Lithium batteries is used.
4. Intelligence
This is the most important part of the autonomous robots. Usually intelligence is achieved by using Microcontroller.
First step in making an autonomous robot is to chalk out what tasks we are expecting the robot to perform. After gauging these we get a vague idea about the design and appearance of the robot.
Robot Chassis Designing
Selecting the Drive Mechanism for the wheeled motion:
Robot with steering wheel:
• Power for motion is provided by back wheels and turning is achieved using front wheels.
• This scheme is similar to that of cars.
Advantages:
1. When path to be followed is straight in nature with curved turns this configuration gives fastest speed and graceful path following.
2. Don’t need to modify left or right wheels velocity to follow the path. This is very advantageous when we want precision velocity control. In this case back wheels take care of velocity control and front wheels take care of direction control.
Disadvantages:
1. It will not able to take very sharp turns. Hence it is difficult to move robot on the grid of lines.
2. Somewhat difficult and expensive to make.
3. Front wheels will need position feedback to control turning control.
Robot with differential drive:
• A method of controlling a robot where the left and right wheels are powered independently.
• The Three Wheel Differential drive uses two motors and a caster or an omni-directional wheel easiest to design and program.

• The radius and centre of rotation can be varied by the varying the relative speed of rotation between the two motors.
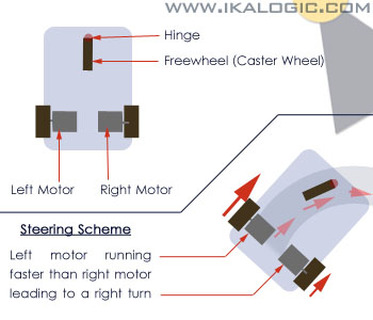
• Rotating the wheels in different directions provides a sharp turn.
• For a smooth turn, rotate the wheels in the same direction but with different speeds. Greater the difference in speeds, smaller the radius of rotation.
Advantages:
1. Zero turning radius achievable.
2. Easy to move when path to be followed is contoured and zigzag in nature. E.g., navigating along the maze of lines.
Disadvantages:
1. If we want to move along curved path we have to control left and right motor’s velocity independently. Hence precision velocity control becomes difficult as actual velocity of the robot will be average of the both wheels.